

张飞天团队最新《T-RO》论文 | RGBlimp-Q:仿生滑翔飞艇机器人实现高效稳定飞行与空中抓取
张飞天团队最新《T-RO》论文 | RGBlimp-Q:仿生滑翔飞艇机器人实现高效稳定飞行与空中抓取

近日,北京大学先进制造与机器人学院张飞天副教授的机器人控制实验室(Robotics and Control Laboratory, RCL)在飞艇机器人方面取得重要突破,首次提出并实现了集飞行姿态控制与空中抓取功能于一体的仿生滑翔飞艇机器人“RGBlimp-Q”。该研究受鸟类在复杂气流扰动下滑翔飞行、抓握树枝停栖等机制启发,首次将移动质心驱动机制引入飞艇机器人系统中,并利用仿生连续体鸟爪设计同时实现基于移动质心驱动的飞行姿态控制与空中抓取操作。
相关成果以“RGBlimp-Q:基于仿生连续体鸟爪的移动质心驱动滑翔飞艇机器人”(RGBlimp-Q: Robotic Gliding Blimp With Moving Mass Control Based on a Bird-Inspired Continuum Arm)为题,发表在国际期刊《IEEE机器人汇刊》(IEEE Transactions on Robotics, T-RO) 上(DOI: 10.1109/TRO.2025.3600135)。
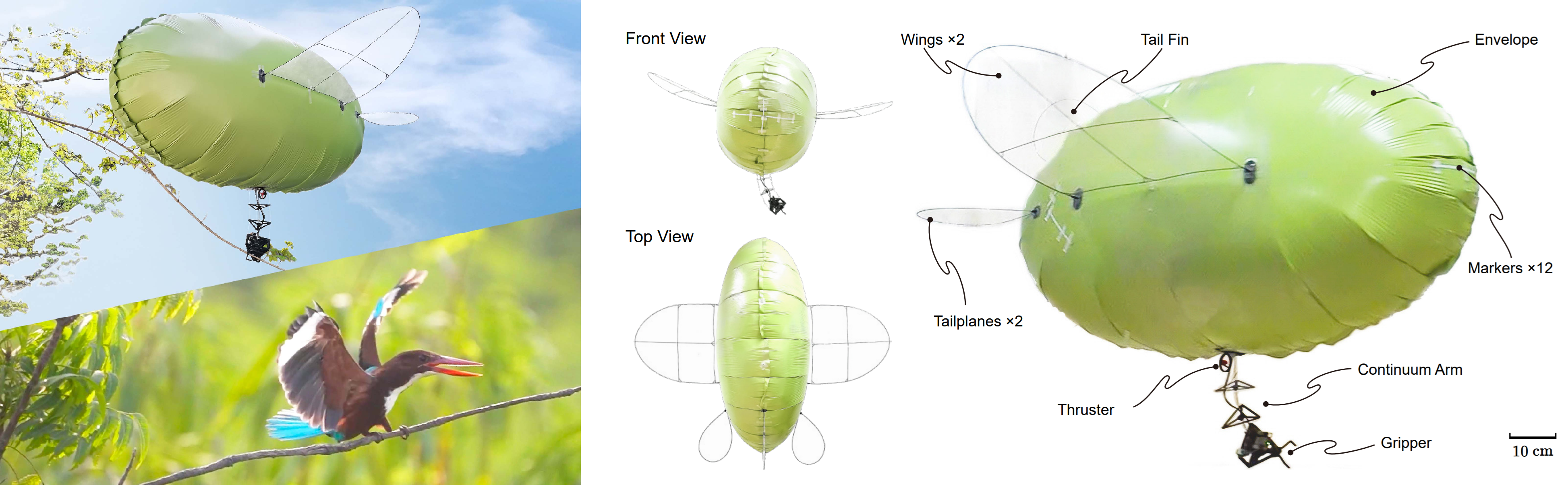
图1 仿生滑翔飞艇机器人原型机
飞艇机器人是一种轻于空气(Lighter-than-air, LTA)飞行机器人,其利用静浮力(如氦气球)悬浮飞行,具有长续航、人机交互安全等优势。然而,较大的浮力体也使其易受到环境气流扰动,这严重限制了其应用范围(如室外自然风环境)。受鸟类滑翔飞行、栖息等行为启发,研究团队首次提出将移动质心驱动机制引入飞艇机器人系统,并通过仿生连续体鸟爪同时实现了移动质心姿态控制(Moving-mass-based attitude adjustment)与空中抓取操作(Aerial Manipulation)。
关键技术突破
1. 创新驱动机制:移动质心驱动机制实现高效姿态调整
区别于传统全向多推进器等驱动方式,RGBlimp-Q首次提出并成功在飞艇机器人系统上实现了移动质心驱动机制。利用连续体机构质量集中分布的特点,将大部分重量集中于末端,通过驱动集中于末端的质心作三维运动,产生重力力矩对飞行姿态进行高效且不依赖于空气动力学的飞行姿态(俯仰/翻滚)调节控制。

图2 移动质心驱动机制姿态调整流程示意
2. 首创仿生连续体鸟爪:移动质心驱动与空中抓取操作一体化
灵活的仿生连续体鸟爪设计,同时赋予飞艇机器人移动质心驱动飞行姿态控制与空中抓取操作双重能力。
受鸟类栖息抗风策略启发,末端仿生爪能够稳定抓取树枝等进行锚定,从而有效抗风或执行定点检测等任务。
针对飞艇有限载荷,团队提出了一种解耦绳驱机构,仅用两个电机即可精确控制三根驱动绳,实现两自由度空间运动(俯仰、横滚),显著降低系统重量和能耗。
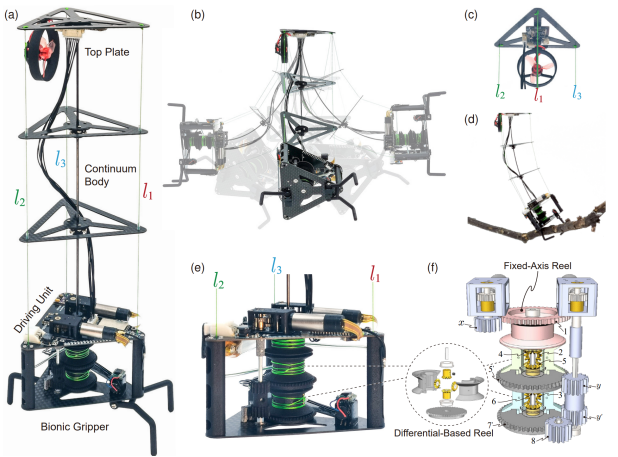
图3 仿生连续体鸟爪原型机及其差速齿轮解耦机构
系统实现与实验验证
1. 有效改善飞行姿态稳定性
室内风扇和室外自然风环境下,移动质心姿态控制显著提升了航向保持能力。通过闭环反馈控制快速响应风扰,利用重力矩调节横滚角并产生偏航力矩,进而有效补偿航向偏差。
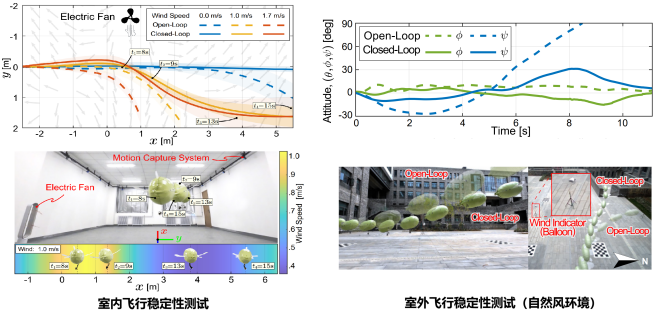
图4 室内外飞行姿态稳定性测试结果
当遭遇强风扰动时(~2.2m/s),RGBlimp-Q成功飞向树枝并抓取锚定,有效抵抗风扰。
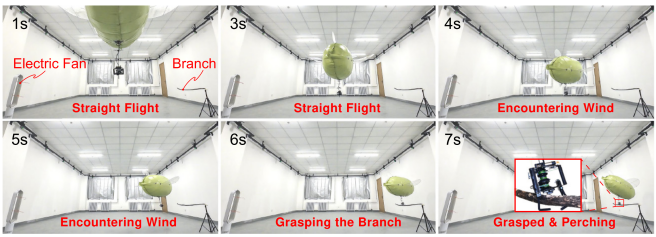
图5 强风环境下的空中飞行-抓取-锚定测试
2. 较传统驱动机制的性能提升
通过移动质心驱动机制,RGBlimp-Q较传统全向多推进器驱动方案表现出更优的飞行姿态控制和飞行续航能力。

图6 飞行续航性能实物比较:RGBlimp-Q(移动质心驱动机制)vs. Omni-Thrust(全向多推进器驱动机制)
对比测试显示,在相同速度(~0.4m/s)下,RGBlimp-Q续航时间提升了125%(27min vs. 12min),飞行距离提升了121%(605m vs. 274m),单位距离能耗降至1.8 mWh/m。
3. 可靠性验证
仿生连续体鸟爪经过超过3000次循环、18小时的重复运动测试,姿态重复精度高(俯仰/横滚平均标准差≈0.1°),驱动绳张力衰减极小(<1.8%<>),证明了其长期工作的可靠性。
意义与前景
将移动质心飞行姿态调节机制成功引入飞艇机器人,为该类型轻于空气飞行器的长续航、安全、稳定飞行开辟了全新的技术路线,显著提升了飞艇机器人的飞行稳定性、续航能力及空中操作能力。
使其在野外搜救、大范围空中监测、长距离设施巡检、人机安全交互等领域更具优势。团队下一步将提升机载感知能力、开发更先进控制策略,并优化气动外形以进一步提升性能,并将其应用于具体场景中。
该论文由北京大学先进制造与机器人学院博士生程淏(第一作者)、张飞天副教授(通讯作者)合作完成。相关研究得到了国家自然科学基金等项目资助。
论文链接:https://ieeexplore.ieee.org/document/11129463